在特殊(shū)結(jié)構橋梁(如斜拉橋、懸索橋、鋼管混凝土拱橋等)或者大跨高墩橋梁的檢測過程中,常規檢(jiǎn)測手段存在局限性,比如(rú)檢查盲區。盲區的檢測效率低、難度(dù)大、危(wēi)險係數高,而且檢測精細(xì)度(dù)遠(yuǎn)遠不夠。因此,采用先進的無人智能檢測技術開展養護檢測工作變(biàn)得越來越有必要。本文簡單介紹(shào)了4種在長大橋梁檢測中的無人智能檢測技術,包括無人機、高清攝像、纜索機(jī)器人、水下(xià)機器人,以及無人智能設(shè)備綜合應用案例。
常(cháng)規檢測手段的局(jú)限
橋梁檢(jiǎn)測主要是對橋梁外觀和結構性能進行檢查評定,通常對(duì)結構性能的檢查是(shì)通(tōng)過一係列的力學試驗完成,而對其外(wài)觀的檢查主要依靠肉眼或者(zhě)輔助工具(如橋檢車、望遠鏡等),來檢測橋梁主要構件是否出現裂(liè)縫、開裂破損(sǔn)、露(lù)筋鏽蝕、支座脫空等病害(hài)。
隨著我(wǒ)國公路建設裏程不斷增加,大型橋梁數量增多,養護維護(hù)和檢測工作的難度也不斷提(tí)高。截至2016年底(dǐ),全國公路橋(qiáo)梁共有80.53萬座,4916.97萬米。特大橋梁4257座,大橋86178座,二(èr)者長度約占橋梁總(zǒng)長的61.1%。
對於特殊結構橋梁(如(rú)斜拉橋(qiáo)、懸(xuán)索(suǒ)橋、鋼管混凝土(tǔ)拱橋等)或者大跨高墩橋梁(liáng)來說,常規檢測手段存在局限性,有檢查盲區,而盲區檢(jiǎn)測效(xiào)率低、難度大、危險係(xì)數高。如對斜拉橋拉索的檢測,人工爬上拉索向下進行檢測作業,不僅效率低、難度大、危險係數高,而且檢測精細度遠遠不夠,而采用纜(lǎn)索機器人檢測拉索能很好地解決這(zhè)個問題(tí)。為了(le)保證橋梁使用的安(ān)全和問(wèn)題隱患的有效消除,采用先進的智能檢測技術開展(zhǎn)養(yǎng)護檢測工作變得越(yuè)來越有必要。以下(xià)主要介紹無人機檢測技術、高清攝像檢(jiǎn)測技術、纜索機器人檢測技術、水下機器人檢測技術(shù)這4種無人智能檢測技術。
無人智(zhì)能檢測技術
無人機
無人機橋梁快速檢測係統主要由無人機、數據傳輸係統、任務(wù)荷載係統(tǒng)、地麵站係統、其他設備等組成。無(wú)人機一般(bān)采用起降平穩的多旋翼無人機,利於數據采集和(hé)觀測。數據傳輸係統用於係統控製信號、檢測(cè)數據的傳輸。地麵站係統則用於實時監控無人機飛行、檢查拍攝情況,利於及時糾正飛行軌跡和發現橋梁明顯病(bìng)害。其他設備(bèi)除了常規的維修保養(yǎng)工(gōng)具外,還包含檢測結(jié)果分析(xī)處理係統。用於橋梁檢測的無人機與常規航拍無人機的任務荷載係統略有不同,前者的三軸增穩雲台、高清攝像機置於飛(fēi)行器(qì)上方,航拍用雲台(tái)一般布置在下方。常(cháng)用於橋梁檢測的多旋翼無人機係統如圖1。

2.無(wú)人機特點
相比傳統橋梁檢(jiǎn)測技術,無人機檢測技術具有以下優點:
①無人(rén)機可以直接到達檢測部位,無須其他輔助措施,節省費用;
②檢測橋墩、橋座、橋腹等危險場所,無須(xū)搭架(jià)或者(zhě)吊籃配合人員檢測(cè),極(jí)大地提高了(le)安全性;
③對於部(bù)分無法企及的橋腹(fù)、拉索等部位,無人機(jī)可以抵(dǐ)近觀察(chá)了(le)解更多細節;
④定(dìng)點懸停觀測、實時傳(chuán)輸畫麵、效率高、基本不影響正常交通;
⑤在天氣情況允許的(de)前(qián)提下,實施檢測(cè)橋梁具備較高的及時性;
缺(quē)點是梁體狹小空(kōng)間處無法檢測,需傳統檢測方式;續航能力(lì)一般;工作(zuò)環境受天氣環境影響大。

高清攝像
高清攝像綜合使用了攝影測量(liàng)與圖像識別技術,從影像中提取待病害位置、尺寸等信息。高清攝像係統(tǒng)主要由攝像部分、成像放大部分、轉動控製部分、圖像(xiàng)處理分析部分4部(bù)分組成。
攝像(xiàng)部分:主(zhǔ)要用於(yú)現場拍照,將(jiāng)病害以圖像的形式記錄下來。
成像放大部分:使用高(gāo)倍率的望遠鏡頭,對拍攝的病害進行放大處理,使圖像滿足檢測精度(dù)要求。
轉動控製部分:將拍攝區域網(wǎng)格化處理,轉動(dòng)控製部(bù)分可自動(dòng)將鏡頭對準待拍攝區域,大幅度提高拍攝速率。
圖像處理(lǐ)分(fèn)析部分:首先將斜視圖像(xiàng)轉換為正視圖像,而後使用(yòng)先進的圖像處理技術,識別出病害長度、寬度等尺寸信息。
1.高清攝像(xiàng)檢測(cè)應用
高(gāo)清攝像技術主要應用於高聳結構物(wù)的表觀檢測,如橋梁、火(huǒ)電站冷卻塔、水壩、核電站反應殼等。在長大(dà)橋梁檢測中,高清攝像技術多用於斜拉橋、懸(xuán)索橋的索(suǒ)塔外觀檢查和(hé)不易檢測到的橋梁側麵底麵等。
2.高清攝像特點
高(gāo)清攝像機具有以下優點(diǎn):
①操作簡單快捷。設備總重不超(chāo)過15kg,現場2人即可順利操作。從開箱到組裝完畢(bì),總共不超過10分鍾。
②檢測精度高。50m距離範圍內(nèi),有效精度可達到(dào)0.1mm。
③安全可靠。操作人員在(zài)陸地空曠區域拍攝,避免在支架或(huò)掛籃上登高作(zuò)業,有效保證檢測人員的人身安全。
④不幹擾結(jié)構物的(de)正常運營。該方法為非接觸性量測手段,不幹擾被測物自然狀態。例如橋梁檢(jiǎn)測中無須封路,避免了道路審批的繁瑣辦(bàn)理流程。
⑤拍攝影像可長期保存(cún)。便(biàn)於與曆史缺陷進行對比,掌握病害的演變規律。
⑥展示效果好。檢測結果以高清漫遊的方(fāng)式呈現出來,還原現(xiàn)場,猶如身臨其(qí)境。
纜索機器人
纜索是斜拉橋的主(zhǔ)要承重部分,其(qí)造(zào)價約占(zhàn)全橋造價的25%~30%。但其長期暴(bào)露在大(dà)氣之中,受到風(fēng)吹、日曬、雨淋和環境(jìng)汙染的侵蝕,其表麵會受到較嚴重的破壞,這會對整座斜拉橋帶來不利的影響。然而大型斜拉橋纜索都存在安裝後難以進行健康(kāng)檢測的問(wèn)題,導(dǎo)致嚴重安全隱患。為了降(jiàng)低安全隱患,必須對橋梁纜索進行定期的檢測,並對其中有損(sǔn)傷的纜索進行塗裝、修複或更換。
纜索機器(qì)人是一種能夠攜帶相關(guān)設備攀(pān)爬纜索,並對其進行(háng)高空作業的(de)爬行機器人,它是(shì)專門針對高空斜拉(lā)索進行設計和應用,能夠實現纜索準確、及時、快速、方便地檢查。利用其作為載體,安裝高清攝像裝置和鋼絲探傷傳感器,能進行纜索外觀和內(nèi)部鋼絲情況的詳細檢測。
檢測機器人包括檢測裝置、爬行機構、控製係統、電源、電機等(děng)幾個(gè)部分,其在(zài)纜索上的安裝圖如圖3所示。
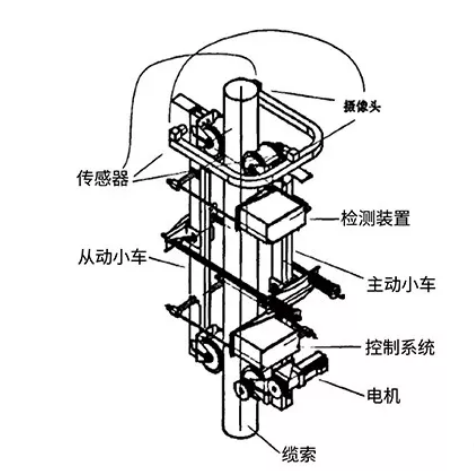
圖3 纜索機器人安裝示意圖
檢測裝(zhuāng)置的作用是檢測橋梁纜索外表及內部是否有損傷,可以是電渦流檢測裝置、磁(cí)漏檢測裝置、超聲波檢測裝置等(děng)。檢測的結果由控製和監視(shì)係統負責采集並(bìng)存儲。
爬行機構是機器人的驅動係統,它的任務是帶動整個機構按設定的任務自主地在(zài)纜索上運(yùn)動。
控製係統是整個係統的(de)中樞,它要完成同(tóng)地麵操作人員的通訊、采集檢測裝置檢測的結果、控製並(bìng)驅動爬行機構按照要求運動。
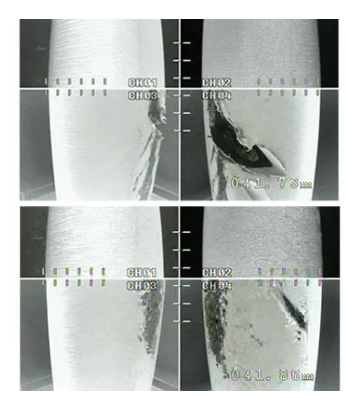
圖4 纜索機器人檢測到(dào)的斜拉索破(pò)損照片
水下機器人
橋梁基礎(chǔ)是橋梁的重要(yào)結構之一,它不僅承受著橋梁的恒載和活載,還將它(tā)傳遞給地基。然而橋梁經過一段時間運(yùn)營後,往(wǎng)往會(huì)因為(wéi)基礎混凝土澆築質量(liàng)差(chà)或流水長期衝刷侵蝕等(děng)原因而出現病害,如基(jī)礎淘(táo)空、傾斜、下沉、混凝土衝蝕、磨損(sǔn)、破損、露筋、鏽蝕(shí)、夾泥、開裂和縮徑等,這些病害均會危及橋梁的正常使用。由於(yú)基礎往往位於水麵以下或(huò)埋置在土體之中,成橋後,基礎頂麵(miàn)以上(shàng)已修築墩台、梁板等結構物。另(lìng)外,基礎位於水麵(miàn)之下,人(rén)工檢測作業存在很大的安全隱患。這些現實情況給橋梁(liáng)檢測的順利實施帶來了很大的困難,檢測單位無法及時了解成橋(qiáo)後基礎的病害情況。針對上述狀(zhuàng)況,使用水下機器人檢測橋梁基礎成為長大跨(kuà)海、跨江橋梁樁基檢測(cè)的必要手段。
水下遙控機器人(英文縮寫ROV)潛水有多種,通常可分為小型觀察型和作業型兩種。按動力範圍和作業水深分類,作(zuò)業型又可分為(wéi)輕型、中型、大型和超深(shēn)型幾種。目(mù)前在水下遙控機器人的(de)基礎上,已經(jīng)研製成功更為先進的水下LBC多功能運動車,它是ROV和水下爬行器的完美結合,它(tā)具有普(pǔ)通(tōng)ROV的功能(néng)外,還具有爬行器功能。如果需要仔細觀察某一個平麵物體,LBC可(kě)以轉換到爬行器模式(shì),借助4個輪(lún)子在平麵上(shàng)自(zì)由爬(pá)行(háng),可以仔細檢查物體(tǐ)表麵。在水下爬行時,顯示器(qì)上會顯示裏程表。另外還具有成像聲呐和水(shuǐ)下定位係統。檢測人(rén)員應根據不同的檢測環境、檢測目的,選擇合(hé)適的水下機器人。
水下機器人檢測作業的(de)優點(diǎn)在(zài)於能深水(shuǐ)檢測,這是水下攝像儀檢測、潛水檢測無法比擬的優勢;缺點是目前(qián)水(shuǐ)下機器人的推進器動力還不足,一(yī)般水下檢查作業型的抗(kàng)水能力是2~4節。因此,檢查(chá)型的水下機器人目前適合於(yú)流速較低的跨(kuà)海橋梁(liáng)以及庫區橋梁的基礎(chǔ)檢測,對於(yú)流速較大的橋梁基礎尚不能完成檢測任務。
綜合(hé)應用(yòng)顯(xiǎn)身手
杭州灣跨海大橋是我國G15沈海高(gāo)速的重要(yào)組成部分,北起(qǐ)嘉興海鹽鄭家埭,跨越杭州(zhōu)灣海(hǎi)域後止於寧波慈溪水(shuǐ)路灣(wān),全長約36km。大橋主要工(gōng)程包括北(běi)引(yǐn)線、北(běi)引橋(qiáo)、北航道橋、中引橋、南航道橋,海中平台及匝道橋、南引(yǐn)橋和南引線,其中(zhōng)北航道橋為主跨448m的鑽石形雙塔雙索麵鋼箱梁斜拉橋,南航(háng)道橋(qiáo)為主跨318m的A形單塔雙索麵鋼箱梁斜拉橋。大橋受(shòu)海洋環境影響顯著,運營環(huán)境惡劣(liè),結構耐久性問題突出。為了有效掌握橋梁運營(yíng)使用情況,需要對主要結構及構件進行詳(xiáng)細、有效的檢(jiǎn)測。另外,南(nán)、北航道橋采用斜(xié)拉橋的結構型式,橋梁包括(kuò)斜拉(lā)索、索塔、鋼管樁等特殊和易(yì)損構件,常規方法無法滿足檢測的需要。
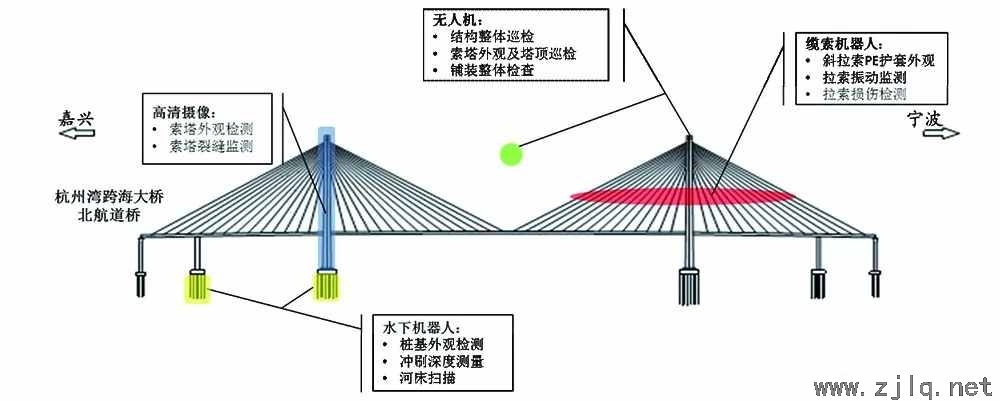
圖5 無人智能設備綜合應用——杭州灣跨海大橋北(běi)航道橋
為解決航道橋檢查檢測問題,在杭州灣跨(kuà)海大橋上(shàng)對無(wú)人智能設備進行了綜合應用。根據航道橋結構(gòu)特點、構件類型和位置,安排不(bú)同(tóng)的無人檢測設備,現場工作和成果(guǒ)分(fèn)析由專業檢測單位(wèi)承擔。以北(běi)航道橋(qiáo)為例,無人智能設備的綜合應用情況如下。
3.杭(háng)州灣(wān)跨海大橋所在海(hǎi)域具有潮差大、潮流(liú)急、衝刷(shuā)深的特點,采(cǎi)用(yòng)傳統人工水下樁基(jī)探摸作業具有較大風險。為有效掌握大橋樁基礎的運營狀況,特別是鋼管(guǎn)樁(zhuāng)的腐蝕以及河床的衝刷深度,大橋每年利用水下機器人抽檢部(bù)分鋼管樁(zhuāng)基礎。通過水下機器人上的拍攝設備,可知目前所檢樁基與(yǔ)承台結合(hé)位完好,樁身整體(tǐ)結構完(wán)整,鋼管樁表麵防腐塗層未發現(xiàn)有明顯脫落(luò)及鏽蝕的地方。另外,利用機器人上安裝的聲呐掃描裝置,對樁基所在河(hé)床進(jìn)行了掃描,確定了衝刷深度。
1.利(lì)用高清攝像設備對北航道橋的索塔外(wài)表麵進行全麵檢查,檢查(chá)頻(pín)率每年1次。由於高清攝像設備的特點,檢(jiǎn)查範圍可涵蓋索塔上(shàng)、下塔柱的各個側麵。通過遠距離拍攝(shè),對平時采用常規檢測手段、難以抵近的部位進(jìn)行了詳細檢查;同(tóng)時利用配套的圖像識別和處理係統,不僅將索(suǒ)塔表麵(miàn)的裂縫、破損、滲水等病(bìng)害,進行準確、有效的識別和記(jì)錄,還對拍攝照片進行拚接,形成了索塔表麵病害的三維展示圖。通過係(xì)統形成的檢測成果,一方麵便於直觀查看病害位置和類型,另一方麵形成了(le)索塔外表麵病害基準數(shù)據庫,在後續的檢查過程中方便對相同病害(hài)進(jìn)行跟(gēn)蹤觀測。
2.利用纜索機(jī)器人對北航道橋全(quán)部112根拉索進行檢查,檢查頻率為每年1次(cì)。應(yīng)用纜索機器人(rén)檢測斜拉索(suǒ),檢測(cè)過程不(bú)需封橋,不影響(xiǎng)橋梁(liáng)正常通行;還能夠檢測到高(gāo)空(kōng)段人工無法檢測到的斜拉索部位,檢測更詳細;檢測中,機器人負責(zé)測量過程的(de)采集數據,操控人員負責安裝和控製,大大減輕了檢測人員(yuán)的(de)工作(zuò)量,且(qiě)安全性好。因此,采用纜索機器人能夠有效滿足杭州灣跨海大橋斜拉索外觀的(de)檢測需要。
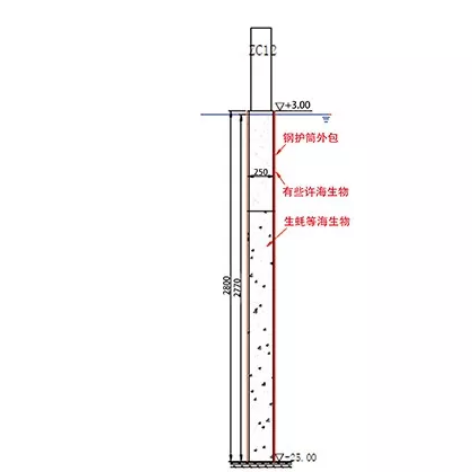
圖7 杭州灣大橋水下機器人檢測(cè)成果
4.在大橋的檢測過程中,無人機的作用主要包括橋梁整(zhěng)體巡檢和配合檢查。一方麵,利用無(wú)人(rén)機(jī)對航道橋進行整(zhěng)體巡(xún)檢,了解橋梁安全保護區內有無違法現象、航道輔助設施是否齊全完善。另一方麵(miàn),利用無人機輔助高清(qīng)攝像設備對索塔外表麵進行檢查,對(duì)需要(yào)複核的病害進行抵近(jìn)拍攝,確保了(le)高清攝像(xiàng)檢測結果的準確性。
綜上(shàng),通過在杭州(zhōu)灣跨海大橋航道橋上綜(zōng)合(hé)應用無人智能設(shè)備,有效解決了跨海纜索橋梁結構的(de)檢查檢測問題。利用(yòng)無(wú)人智能設備的專(zhuān)項檢測結果,結(jié)合大(dà)橋現有外觀檢查(chá)資料,可以更加科學、全麵、準確地評價橋梁結構的技術狀況和(hé)運(yùn)營(yíng)使用情(qíng)況。
未來,隨著社會科技水平的不斷提高,應用在橋梁檢測領域的檢測方法(fǎ)和手段也將逐步智能化。采用橋梁智能化檢測技術能夠保障橋梁結構在運營過程中的安全性,確保使用者的生命財產(chǎn)安全。在科學技術、人工智能(néng)飛速發展,逐漸(jiàn)普及的今天,已經有越來越多的新(xīn)型智能化檢測技術運用於橋梁檢測養護工作中。有關單位應當對這些信息技術加強了解,結合(hé)實(shí)際(jì)情況,合理(lǐ)、科學地引入,提升橋梁(liáng)檢查工作的有效性。





