中交路(lù)橋(qiáo)科技是從事工程檢測監測、城市安全監測預(yù)警與評價、數字(zì)智能化研發為一體的複合型高新技術集團(tuán)企業。
目前(qián)我國橋梁水(shuǐ)下結構的檢測仍讓處於起步階段,甚至在相關規範中沒有明確(què)的規定和要求。既有橋梁(liáng)水下墩台(tái)、基礎的衝刷以及結構的外觀缺陷如何進行檢測和評估也是橋梁檢測的重要內容,隨著(zhe)技術的進步這也是我們(men)橋梁管理、養護應(yīng)該關注的問題。我們(men)近幾年也經常能看到“蛙人”對橋梁水下結構檢測的新聞,其實“蛙人”也就是我們常說的潛水員。潛水員(yuán)對橋梁進行檢測通過潛入水下通過觸摸(mō)、觀察(chá)等手段來(lái)實施檢測(cè),而檢測人員通過潛水員的描述來判斷橋梁水下結構的病害和缺陷。由於橋梁檢測的專業性(xìng)很強,因此潛水員的檢測有點類似於“盲人摸(mō)象”。本文(wén)對橋梁水下結構的檢測方法進(jìn)行簡單的總結,以起(qǐ)到拋(pāo)轉引(yǐn)玉引的作用來(lái)推動(dòng)我國橋梁水下檢測技術的發(fā)展。
一、水下視(shì)頻檢測(cè)的方法
水下(xià)攝像係統一般包括水下攝像機/攝像探頭、傳輸線纜和圖像采集設備,水下攝像機(jī)和連接線纜要求具有(yǒu)水密性。水下視頻檢測係(xì)統檢測時將水下攝像機/攝像探頭下放至水下(xià)待檢測的部位,水下攝(shè)像機連接的數據線纜將(jiāng)圖像傳(chuán)輸至圖(tú)像(xiàng)采集設備,通過圖像采集設備來顯示攝像(xiàng)機在水(shuǐ)下的位置以及實時采集的圖像。在實施橋梁水下檢測時圖像采集設備可以進行全過程的錄像,檢測人員可以通過視頻播放來進行(háng)後續結構病害的分析,此(cǐ)外在檢測時發現結構的病害可以進行(háng)視頻的(de)截屏,並記錄病害的位置以(yǐ)及(jí)截(jié)屏病害(hài)圖像的編號。圖1是某橋梁水下墩柱采用(yòng)水下視頻檢測的截圖,圖中顯示攝像機下水至水下(xià)的距離為8.7m,從(cóng)圖中能明顯看出(chū)墩柱(zhù)表麵有大量的附著物。

圖1 墩柱視頻檢測(cè)的截圖
水(shuǐ)下視(shì)頻檢測係統檢測橋梁時可(kě)以采用以下幾(jǐ)種方法:(1)以船隻或皮劃艇為載體,將圖像采(cǎi)集設備放置在船隻或皮劃艇上(shàng),行至測試位置將水下(xià)攝像機通過絞車逐漸下放至水中檢測;(2)水下視(shì)頻檢測係統通(tōng)過潛水員在指定位置下潛,攜(xié)帶攝像機對橋梁水下(xià)結構進行檢測;(3)采用水下橋梁結構檢(jiǎn)測時,水下視頻監測係統采用水下機(jī)器人搭載(zǎi)的方式(見圖2)。

圖2 水下(xià)機器人視頻係統
二、水下機器人檢測的方(fāng)法
前麵在介紹水下視頻係統時介紹了機器人搭載視頻係(xì)統的方(fāng)式,此外水下機器人檢測橋梁水下結(jié)構時還可以搭(dā)載超短基線定位係統、單波束聲呐、多波束聲呐係統進行水下結(jié)構物的掃描、定位和測(cè)量工作。
采(cǎi)用水下機器人搭(dā)載視頻(pín)及多波速二維掃(sǎo)描聲納掃描成像的方法進行水下結構物的檢測。該係統主要功(gōng)能應包括以下幾個方麵(miàn):
1、水下機器人(ROV):能夠下潛深度滿足水下檢(jiǎn)測要求,能夠通過控製(zhì)台控製機器人的運動(dòng),機器人應采用觀察級機器人;
2、機(jī)器人應配備導航定位係統,目(mù)前通長采用超短(duǎn)基線水聲(shēng)定位係統。
3、視頻監控係統:該係統主要搭載在機器人上對結構物(wù)的進(jìn)行監測,視頻係統能通過控製係統的顯示屏進行適時顯示,並按要求能進行控製拍攝結構損傷、缺損的照片(piàn)或視頻資料(liào);
4、二維多波速聲納:在水質混濁或想(xiǎng)獲得結構物缺損詳細資料時,聲納對結構物進行二維掃麵,對結構的缺損進行相(xiàng)對精細的掃描。
5、水下機器人應配備機器手 水下檢測可能會在水中遇到複雜的檢測環境,配備基本的(de)機器手可以在檢測過程中進行必要的控製和操(cāo)作(zuò)。
水下機器人一般包括水下潛器、臍帶纜、水麵控製台、附件工具等幾個部分(見圖3)。水下潛器包(bāo)括電子(zǐ)倉(cāng)、起落架、推進器、照明燈、視頻攝像係統等部分;水麵控製台包括控製筆記本(běn)電腦、液晶顯示屏、完整係統控製軟(ruǎn)件、USB手動(dòng)控製器等(děng)部分。目前常見的水下機器人的結構見圖3。

圖3 水下機器人係統
三、水下三維激光(guāng)掃(sǎo)描係統
目前,雖(suī)然(rán)水下(xià)激光掃描測量(liàng)係統的作用距(jù)離還比較近,但其百倍於聲納的分辨率使得該革命性的技術(shù)的應(yīng)用前景(jǐng)非常廣闊,國(guó)外已經廣泛用於水下建模、仿真、目標重建、水下結構檢測、大壩橋梁安全評估、海洋油氣、核電站檢測、管道變形檢測等領域。水下(xià)激光三維掃(sǎo)描(miáo)產品目前最(zuì)好的產品水下激光(guāng)掃描儀精度能達到mm級,但(dàn)其測試距離距結構物距離較近,測試距離在1~5m,而且測試的點雲數據在構建實體模型(xíng)需要通過CAD或其它專用軟件進行處理。
通過三維激光(guāng)掃描儀安放在待測橋梁結構物附近的不同的測站進行三維掃描,並將不同測站的數據拚接進行點雲數據的建模可以實現對結構(gòu)物的檢測。三(sān)維激光掃描技術(shù)在實際橋梁水下(xià)結構的應用案例較少。圖4為三維激光掃描水下(xià)結構物的結果,左側為水下結構物的實際照片,右(yòu)側為采用三維激光掃描生成的掃描圖。
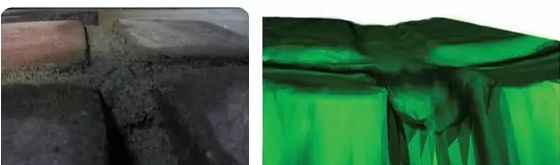
圖4 水下結構物(wù)激光掃描結果對比圖
四、聲呐檢測技(jì)術
目(mù)前國(guó)內外水下(xià)目標(biāo)聲納探測技術已(yǐ)經有很大的進步,出現了很多不同類型、功能各異的聲呐,其中具有高測量效率、高測量精度、高分(fèn)辨率(lǜ)的多波束勘測技術適合於大麵積的水下測繪作業。側掃(sǎo)聲納也是人們(men)常用的水(shuǐ)下探測工具。它分(fèn)為(wéi)低頻側掃聲納、高頻側掃聲納和雙頻側掃聲納。低頻側掃聲納非常適合於對水下管線、大推進(jìn)器、沉船等進行搜索定位。高(gāo)頻側掃聲(shēng)納可提供高分(fèn)辨率的圖像,盡管其作用距離比低頻側(cè)掃(sǎo)聲納近一些,但(dàn)較低頻係統能更詳細地顯示目標的細微特征,雙頻(pín)側掃聲納同時具有低頻係(xì)統的(de)遠距(jù)離和高頻係統的高精度兩個優點。此外還有合成孔徑聲呐掃(sǎo)描技術也可以用於水下結構物的檢(jiǎn)測。
主動(dòng)聲呐的原理是利用發射基陣向水中(zhōng)發射聲脈衝,通過這些脈衝而產生的回聲對水下目標進行測距、定位以及識別。水下機器(qì)人利(lì)用搭載的聲呐對水下橋墩進行檢測,將機器人遊到兩橋墩之間進行360°掃描,並且盡量使機器人靜止(zhǐ)不動。如下圖5為某橋采用機(jī)器人搭載聲呐掃描的圖像,通(tōng)過對圖像(xiàng)進行分析可以對結構物的病害情況(kuàng)進行分析。
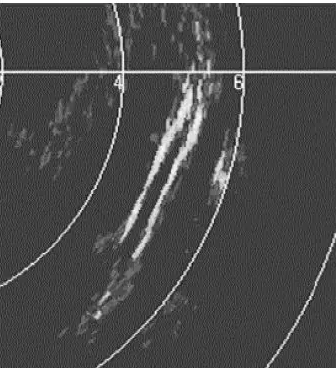
圖5 某橋墩柱聲呐(nà)掃描圖像
此外三維聲呐掃描成(chéng)像檢測技術可以通過船舶將聲呐掃(sǎo)描係統隨三角架安放在水(shuǐ)下橋梁待測結構物的合適位置進行掃描測量,從而對橋梁結構進(jìn)行檢測。三(sān)維全景(jǐng)成像聲納可生成水下地形、結構和目標的高分辨率圖像(xiàng)。聲呐采用緊湊型低重量設(shè)計,便於在三腳架ROV上進行安裝,隻需觸動按鈕,三維掃描聲納就會(huì)生成水下景象的三維點雲。掃描聲納頭和集成的雲台可以生成扇區掃描和球麵掃(sǎo)描數據。有史以來第一(yī)次,在水下,甚至在低照度或者(zhě)零可見(jiàn)度的水下環境(jìng),我們可以獲得(dé)陸地(dì)三(sān)維激光掃(sǎo)描一樣的圖像(xiàng)。而且,這種圖像可以與傳統的激光掃描圖像(xiàng)無縫拚接。圖6~圖9為橋梁(liáng)下部(bù)結構采用聲呐進行掃描成像的過程圖(tú)。
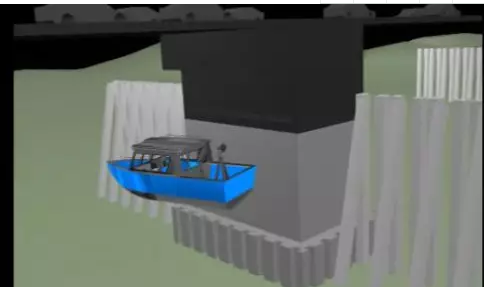
圖6 測(cè)量(liàng)船就位(wèi)
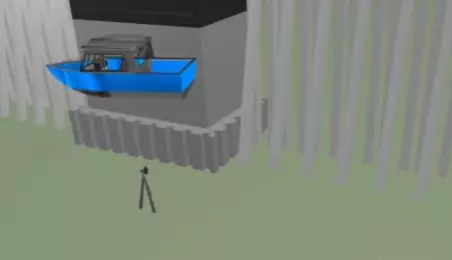
圖7 聲呐係統安放就位
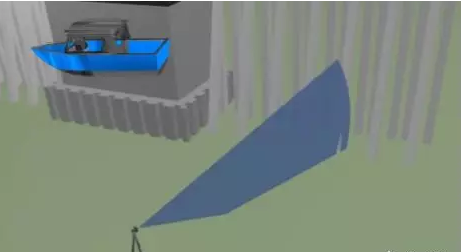
圖8 聲(shēng)呐係(xì)統掃描工作
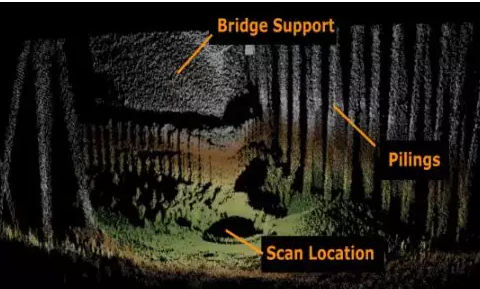
圖9 聲(shēng)呐三維掃描(miáo)成像結果





