隨著全球(qiú)導航衛星係統(GlobalNavigation Satellite System,GNSS)硬件和軟(ruǎn)件的不斷發展,特別是高采樣率GNSS接收機的出現,使其在結構健康(kāng)監測方麵表現出(chū)獨特的優越(yuè)性(xìng),GNSS監測技術具有以下(xià)優勢[1]:①采樣率高,目前GNSS接收機(jī)的采樣率已達到20 Hz,甚至100 Hz;②自動化程(chéng)度高,GNSS接收機的數據采集工作是自動進行,且(qiě)為(wéi)用戶預留了必(bì)要的(de)接口;③四維(wéi)監測(cè),GNSS不但能夠進行高精度的三維位移測量,而且能獲取精度達30 ns的時間(jiān)信息;④全天候監測,GNSS接收機在任何時段都可接收到(dào)工作衛星信號,風雪雨霧惡劣天氣中亦能正常工作,易實現長期的連續監(jiān)測。
GNSS定位解算方(fāng)法分為相對定位和單點定位兩類。在結構健康監測領域,相對定位(wèi)研究主要集中在後處理動態差分技術(Post-Processing Kinematic,PPK)、RTK技術和NRTK技術[2],單點定位研究主要集中在PPP技術。
RTK和PPK技術都需要在橋梁測點附近建立本地基準(zhǔn)站。Ashkenazi等(děng)[3]首(shǒu)次采(cǎi)用(yòng)RTK技術進行橋梁(liáng)結(jié)構的振動監測,測量出主梁的(de)振動(dòng)位移和基(jī)頻(pín)。如(rú)圖1所示,RTK技術是基於載波相位觀測值的實時動態定位技術,位於基準站(zhàn)和流動站的GNSS接收機同步采集4顆以上(shàng)GNSS衛星(xīng)信號,基準站通過通信鏈將(jiāng)計算出的差分(fèn)改正數實時地發送給流動站,解(jiě)算出流動站的瞬(shùn)時空間坐標,實時地提供橋梁結構監(jiān)測點的動態位移[4, 5]。PPK技術是采用事(shì)後方式來處理(lǐ)載波相位觀測值的(de)差分定位技術,其它流程與RTK技術相同[6]。
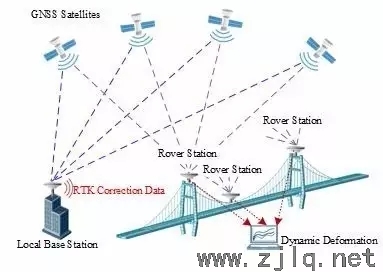
圖1 GNSS動(dòng)態變形監測原理(RTK模式)
NRTK技術是(shì)集Internet技術、無線通(tōng)信技(jì)術、計算(suàn)機網絡技術和GNSS定位(wèi)技術(shù)於(yú)一(yī)體,利用衛星定位綜合服務(wù)係統(Continuously Operating Reference System,CORS)基準站(zhàn)的觀測信息,解算監測站的瞬(shùn)時空間(jiān)坐標,不需(xū)要建立獨立的參考站,其監測原(yuán)理如圖2所示。Meng等[7]首次(cì)研究NRTK技術用於結構健康監測的可(kě)行性,獲得初(chū)步研究成果,隨後餘加勇等[1]采用NRTK技術監測英國諾丁漢Wilford懸索(suǒ)橋動態變形,成功(gōng)識別出最大振幅僅8mm的橋梁結構振動位移。NRTK技術是直接使用本地區CORS基準站,可有效降低監測成本(běn),並解決難(nán)以選(xuǎn)擇合適基準站(zhàn)位(wèi)置的問題[8]。各地方政府和國家(jiā)陸續建立CORS參考站,為NRTK技術的廣泛應用創造了條件。
PPP技(jì)術是利(lì)用載波相位觀測值以及(jí)全球(qiú)若幹(gàn)地麵跟蹤站提供(gòng)的精密星曆和衛星鍾差來(lái)進行(háng)高精(jīng)度定位(wèi)[9]。Xu等[10]在六自由度振動台上評估PPP技術的測量精度,當PPP技術用於短周期GNSS信號處理時,其水平方向(xiàng)測量精度優於2~4 mm,豎直方向測量精(jīng)度優於10 mm;Moschas等[9]采用實驗方法來評估PPP技術的性能,通過與加速度計(jì)及GNSS差分技術解算結果對比,得出PPP技術可精確測量幅度10~20 mm的結構振(zhèn)動(dòng)的結論,Yigit等[11]亦得出類似結論。





